



Flight Club
Flight Clubの説明
Flight Clubは、高騰するシミュレーションゲームです。
サーマルトリガー、雲の形成と崩壊のサイクル、風のドリフト、尾根リフトのある丘、そして3種類の空飛ぶ乗り物(セイルプレーン、ハンググライダー、パラグライダー)があります。
古典的なシミュレーションではなく、「アーケード」タイプであり、すべてが実際よりもはるかに高速に実行されます。それ以外は、可能な限り実際の急上昇条件をシミュレートしようとします。
- 各トリガーには独自のサイクルがあります
- サーマルは強さによって異なります
- リフト強度がコアセンターから落ちます
- サーマルは風で傾斜しています
- 雲が地面を横切って漂います
- 雲の影は太陽の位置に関してリアルです(直接下に表示するオプション)
- 同じタスクで雲底の高さを変更可能
- 青いサーマル(上に雲はありません)
- 目に見えないトリガー(地面にトリガーの表示なし)
- 飛び回ってサーマルをマークする鳥
- 特定の高さまで尾根を持ち上げる丘
- 各グライダーのタイプには、典型的な速度、滑空、沈み込み、ターン半径、およびいくつかのポイントを持つ極があります
できるだけ早くゴールに到達するか、遠くまで飛んでスコアをGoogleリーダーボードに保存してください!
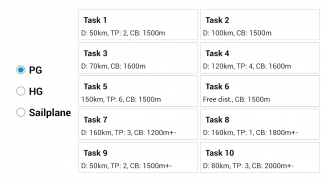
条件が変化する11のタスクから選択できます。
- ショート(50km)またはロング(160km)のタスク
- ターンポイントの数
- 雲底の高さ
- 風の強さと方向
- 雲または青いサーマル
- 丘
- 可視または不可視のトリガー
- 時間ベースまたは自由距離(可能な最大距離:セイルプレーンで1000km以上)
- 同じタスクに対して毎日異なるトリガー
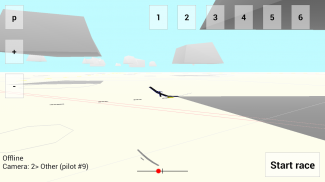
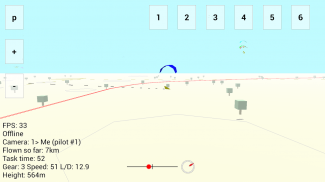
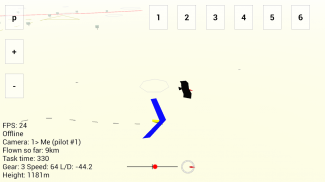
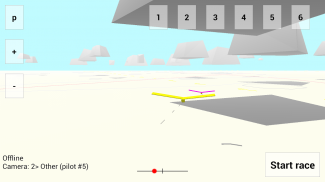
画面上にはいくつかのボタンがあります:
+/- - ズームイン/ズームアウト
p - 一時停止ボタン(これを使用すると、Googleリーダーボードにアップロードするためのスコアが無効になります)
x - すぐに着陸(マルチプレイヤーモードではpボタンに置き換わります)
1 - 次のターンポイントに焦点を合わせてプレイヤーを後ろから見る(グライダーが見える)
2 - 他のプレイヤー/AIグライダーをサイクリング
3 - 現在の「ノード」を上から表示します(タスクはノードに分割されており、プレイヤーが近づくとトリガーとクラウドのロードとアクティブ化が容易になります)
4 - 雲底の半分の高さで、現在のノードを横から遠くに表示
5 - 完全なタスクを上から表示します(すべてのノードとそのトリガーが起動するため、大きなタスクでは控えめに使用します。パフォーマンスが低下する可能性があります)
6 - コックピットからの眺め(グライダーは見えません)
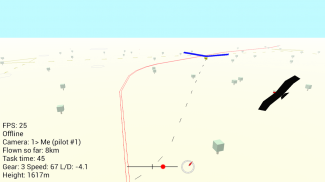
グライダーは、画面の特定の部分をタップすることで制御されます。タスクの開始時に制御オーバーレイ画面を研究してください。
複数のAIグライダーとソロゲームをプレイしたり、ローカルマルチプレイヤーモードで友達とプレイしたりできます!
マルチプレイヤーモードでは、すべてのプレイヤーが同じWIFIアクセスポイントに接続されている必要があります。まず、最初のデバイスでマルチプレイヤーゲームを開始し、グライダーのタイプとタスクを選択した後にのみ、他のデバイスでマルチプレイヤーを開始する必要があります。クライアントデバイスでゲームサーバーが検出されなかった場合は、サーバーのIPアドレスを手動で入力できます。サーバーIPは、ゲームサーバーとして機能しているデバイスの画面の情報セクションに表示されます。
オンラインマルチプレイヤー
モードはテスト段階です。シームレスに動作することを期待しないでください。特に、他のプレイヤーの動きはスムーズではありません。...
注意すべき重要なことは、特定のレース(グライダータイプとタスク)に参加したすべてのプレイヤーが「開始」をタップするとレースが開始され、他のプレイヤーは参加できますが、すべてのレーサーが再び地面につくまでレースに参加できないことです。とにかく、他のプレイヤーの視点からレースを見ることができます(2をタップしてレーサー間でカメラを移動します)。
これはまだ初期リリースですので、バグ(特にマルチプレイヤーモード)や不足している機能に忍耐してください。
あなたの提案でさらに改善します!
クレジット:オリジナルのJavaアプレットゲーム「Flight Club」は、故ダン・バートンによって書かれました。出典:http://www.glider-pilot.co.uk/Flight%20club/hg.htm
Flight Club - バージョン 0.7.8
(20-12-2022)Flight Club- APK情報
APKバージョン: 0.7.8パッケージ: com.cloudwalk.flightclubFlight Clubの最新バージョン
他のバージョン














同じカテゴリのアプリ








